【人物特写】郑志强:造纳米海星机器人、组装肝脏!
发布日期:2022-03-02 供稿:党委宣传部 崔雨涵 摄影:本人提供
编辑:吴楠 审核:蔺伟 阅读次数:【编者按】2022年是党的二十大召开之年,是实施“十四五”规划关键之年,党委宣传部特别推出“喜迎二十大,奋进新征程”专题报道,全面展现学校加强党的领导党的建设取得的成绩,生动讲好北理工人的奋斗故事,广泛凝聚学校事业发展的磅礴力量,以优异成绩迎接二十大召开。

他勤奋好学、踏实努力,荣获北京理工大学徐特立奖学金、北京市优秀毕业生等各类表彰十余项,发表机器人领域学术论文15篇,以唯一第一作者在《Nature Communications》发表论文1篇,申请授权美国专利1项、PCT国际专利1项、国家发明专利3项,受邀参加2018年第八届IEEE国际自动化、控制网络技术会议并作邀请报告,他是机电学院2017级博士研究生郑志强。
微型海星机器人,精准医疗新未来
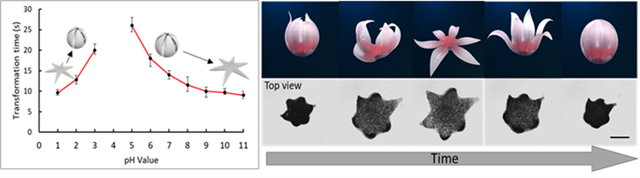
郑志强的研究成果、仿海星微机器人在pH环境感知下的自主形变
“每次看到显微镜下小机器人的舒展与收缩,我的心情总是无比喜悦。于我而言,它们不仅仅是细胞的生长,而是代表着磁控机器人研究的更多可能,也代表了机器人技术未来发展的更多可能。”面对癌症发病率的日益增高,科研人员一直致力于设计并制造一种微机器人取代传统手术,在人体内部完成无创病理采样、药物精准投放等一系列医疗任务,为患者提供更为安全、高效、无痛的治疗方式。凭借自己交叉学科的背景优势和对生物材料与微纳机器人之间微妙联系的独到理解,郑志强立志要构建一种结合生物材料知识的微纳机器人加工方法和理论。博士一年级时,他到香港城市大学开展了为期一个月的考察和调研,在一次实验中,发现微电极的边界效应会造成水凝胶微结构发生机械特性非均质演变,这一发现让他欣喜若狂。这意味着他可以通过设计电场的形状和强度使得水凝胶微结构获得包括复杂形变、环境自适应、多运动模态等一系列自主响应微环境的能力。
在后续的研究中,郑志强受到海星捕食的启发,利用水凝胶非均质演变的原理构建了仿海星微机器人,其柔性触手能够在液体环境下,以自主形变有效贴合任意目标的外部轮廓,并进行抓取与释放。仿海星微机器人是首个基于活体体液离子激励的自主形变微机器人,郑志强提出的基于机械特性非均质演变的生物仿生微单元自形变方法,有效提升了形变微机器人的设计灵活性,可对任意形状剪裁下的单层薄膜机器人赋予形变能力,使其能够感知活体内的离子环境而智能形变。该微机器人为复杂封闭活体环境下的自适应精密生物微操作提供了技术支撑,为未来如心脑血管溶栓、溃疡性结肠炎修复、肿瘤等病灶药物的靶向投递等精准医疗与组织修复领域提供了智能化的操作工具。
2019年下半年,是郑志强进行实验验证的关键阶段,也是发表论文、数据整理的重要时期。然而,突如其来的新冠肺炎疫情打乱了既定节奏,实验在最关键的时候被迫按下了暂停键。他通过学校建立的线上交流平台和远在国外的导师进行密切交流,共同探讨实验计划。在不断地讨论和交流中,郑志强想到了目前实验成果、由水凝胶单一材料构建的全新微机器人因为材料具有完全的生物可降解性,因此可以解决微机器人在活体封闭的实验环境下难以进行回收的难题。
功夫不负有心人。2021年1月,郑志强成功研发了具有环境离子响应能力的智能形变单层薄膜微机器人,相关成果发表于Nature Communications。该成果首次提出了以单一可降解生物材料实现微机器人在环境感知下的自形变,有效解决了微机器人在人体等活体封闭环境下进行无创采样、运输、投递与回收等一体化作业的难题,对于癌症等重大疾病精准医疗具有重要意义。
不断尝试,完成再生医疗的新突破
郑志强和团队成员自主研发的电磁控制系统
“推动科研成果落地转化,让科研工作发挥更大作用。”部分肝移植和全肝移植是治疗许多恶性、急性肝病的重要手段,然而肝供体的紧缺和庞大的治疗需求是肝病治疗长期难以解决的矛盾。通过微机器人进行人工肝组织的功能仿生与结构仿生一直以来被誉为行业内的难题,经过大量的文献调研和实验尝试,并在课题组石青、王化平老师的统筹和指导下,郑志强积极与304医院、积水潭医院合作,围绕人工肝组织的功能仿生与结构仿生这一难题,提出了多机器人跨域协同与流体动力学交互生物操作方法,以人工肝小叶微模块为组装对象,实现了肝组织的自动化三维集成组装与生物功能表达,突破了仿生人工肝组织机器人大规模集成组装技术。该技术可以高效的加工和组装仿生人工肝组织,这为肝脏的移植和修复提供了大量可再生的物质基础。
郑志强还将由微机器人构建的人工肝组织作为针对肝功能疾病的新药测试以及病理研究的生物模型,同时在大鼠活体测试模型上进行了药毒性评估,经验证,两者具有很高的生物功能匹配度,这意味着机器人化生物制造的仿生肝小叶组织有望替代动物成为新型的生物模型。目前,相关技术成果在多家生物公司得到应用推广。研究成果还获得了3项国际学术奖励,形成包括2项国际发明专利、3项国家发明专利的专利群。郑志强的毕业论文获评校级优秀毕业论文,他本人获评了北京市优秀毕业生。
不忘初心,传承北理工红色基因

郑志强(二排右四)和实验室的同学在一起
“在微纳的领域我是个“新手”,未来虽然有很多不确定性,但我坚信我会一直走下去。”本科就读于河北工业大学生物工程专业,硕士是英国诺丁汉大学生物材料理学专业,具有多学科交叉学术背景的郑志强在硕士毕业后,被北理工机电学院开放创新、兼容并济的科研氛围和机器人研究所强大的师资以及先进的科研平台深深吸引,他毅然选择进入北京理工大学机电学院微纳机器人团队继续科研之路,并在此深受滋养。
依托北京理工大学国际交流平台的支持,郑志强与国外多所大学研究团队开展了“超高速细胞组装”课题研究,通过高精度微纳操作机器人和快速视觉捕捉技术,实现了对异质/异构粘弹性生物目标的大规模集成组装,显著提高了机器人化生物微操作对复杂任务的适应性。在Soft-bodied Magnetic Small-scale Mobile Robots国际会议上,郑志强的成果得到了德国马克思普朗克物理智能研究所所长、有磁控微机器人鼻祖之称的M. Sitti教授的充分肯定。他也因此获得马克思普朗克研究所全额奖学金,赴德国马克思普朗克物理智能研究所继续后续的研究工作。
“心态与信念很重要,我也会有绝望低落的时候,但是我知道我想要的不是一次实验的成功,也不是一篇论文的发表。作为北理工人,我深知科研之路没有终点。心里有火,眼里有光,以理性之光浇灌科技之花,我希望自己可以掌握精深的学术,做出对社会有价值的科研成果。”对于未来,郑志强充满决心与信心,他希望将来可以回到北理工教书育人,继续微纳机器人研究的科研事业。





